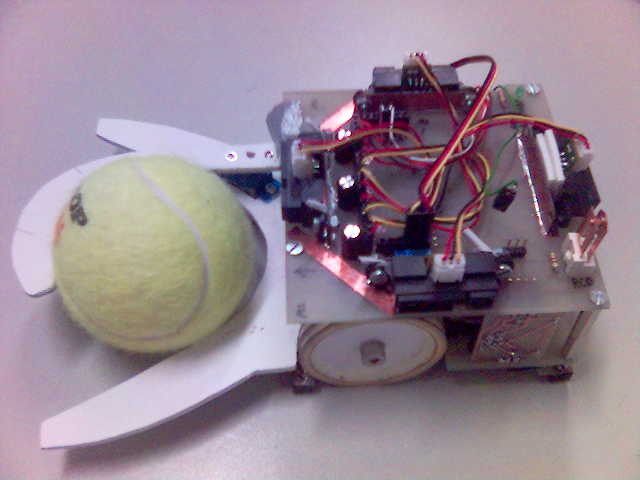
Detección de porteria contraria por baliza infrarroja Compite en pareja con un robot similar (Tiñoso) PIC 16F876 Sensores de distancia: GP2D120 y GP2d12 2 motores COPAL Sensores de suelo CNY-70 Pinza realizada con microservo