 Pagina principal del grupo GROUSAL
Pagina principal del grupo GROUSAL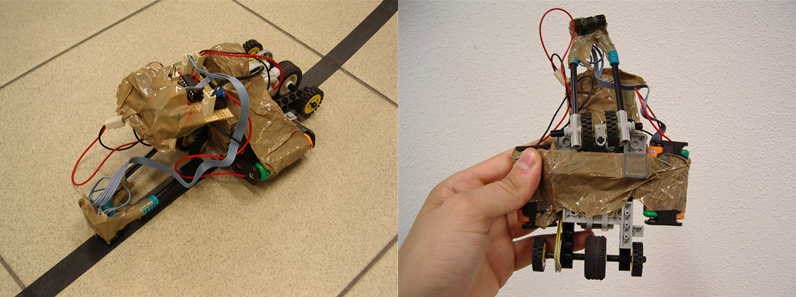
intentando mantener una enorme simplicidad mecánica y un bajo presupuesto.
PIC 16F876 3 sensores CNY-70 2 motores CC Driver de motor L293 Alimentación 4,8V Disposición en triciclo Velocidad Maxima: 2 m/s
ROBOLID04 - 2° puesto HISPABOT04 - Cuartos de final ROBOLID05 - 3° puesto