para un Brazo Robótico MA2000
Autor: Raúl López Chiches
Este trabajo se propone como una actualización de los robots MA2000, el uso de este brazo robótico es bastante común en la enseñanza de diversas ingenierías y con esta actualización permitirá que pueda continuar utilizándose sin tener que comprar nuevos equipos.El principal objetivo de este trabajo es desarrollar un nuevo hardware de comunicaciones para este robot que sustituya al actual. El hardware de comunicación utilizado por el robot MA2000 se conectaba a la placa base del ordenador a través de un bus ISA. Como este bus ya no se encuentra en las placas base actuales se tenín que utilizar ordenadores ya desfasados en el trabajo con estos robots.
Para el nuevo hardware de comunicaciones se ha utilizado un microcontrolador PIC (PIC18F2680). Este circuito nos permitirá emular el comportamiento del antiguo hardware de comunicación (el cual utilizaba un PPI8255) consiguiendo mantener la compatibilidad con el sistema robótico. Nos permite también establecer una comunicación serie con el ordenador; esto aporta al nuevo sistema de una mayor independencía respecto a la arquitectura del ordenador y le aporta una gran flexibilidad.
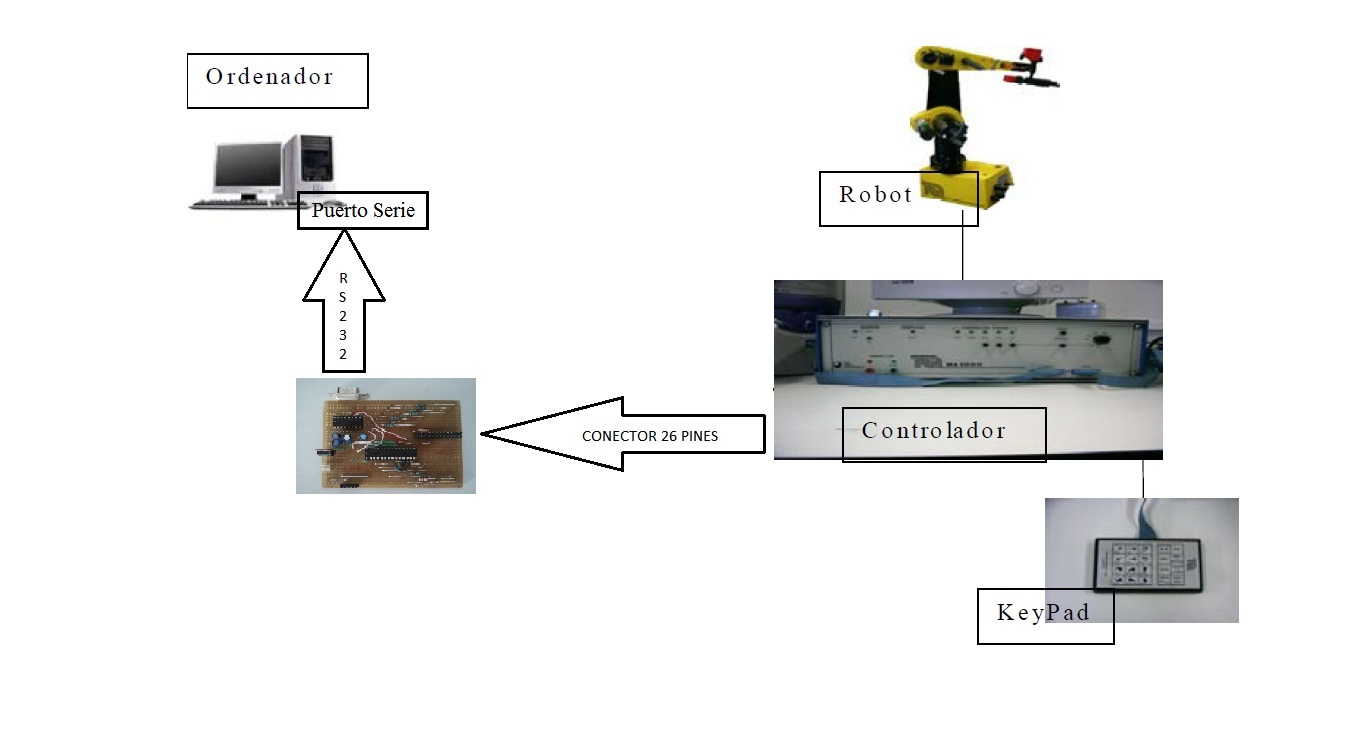
En la siguiente imagen podemos ver el esquema general del sistema con el nuevo hardware de comunicación, el MA2000 USAL INTERFACE CIRCUIT.
Adem´s, al tratarse de un microcontrolador, se ha desarrollado un driver que controla el comportamiento del circuito; este driver se encuentra en la memoria de programa del PIC.
Tambié ha sido necesario implementar una biblioteca que permitiera la comunicación entre el ordenador y el hardware de comunicación, la biblioteca PIC.
A continuación se muestran una serie de imágenes del nuevo hardware de comunicación.
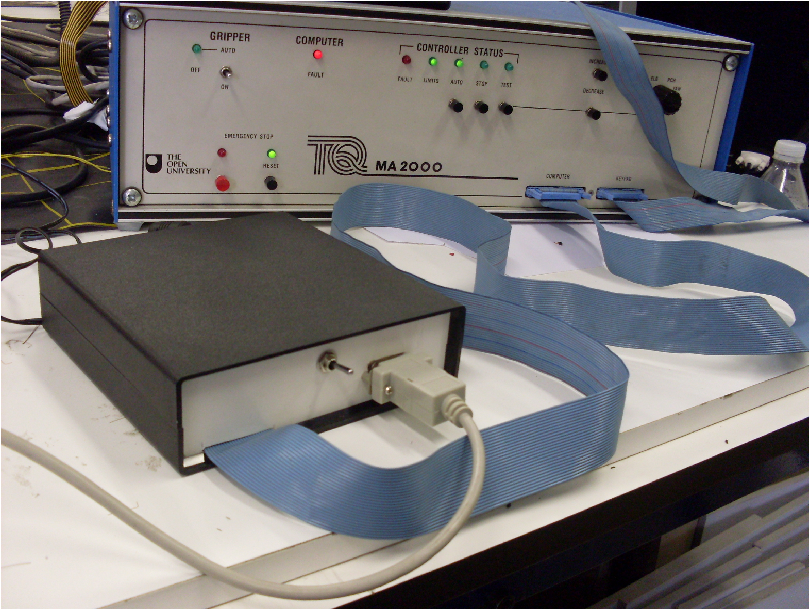
En esta imagen podemos ver el nuevo hardware de comunicaciones y su conexión con el controlador-interfaz del MA2000.
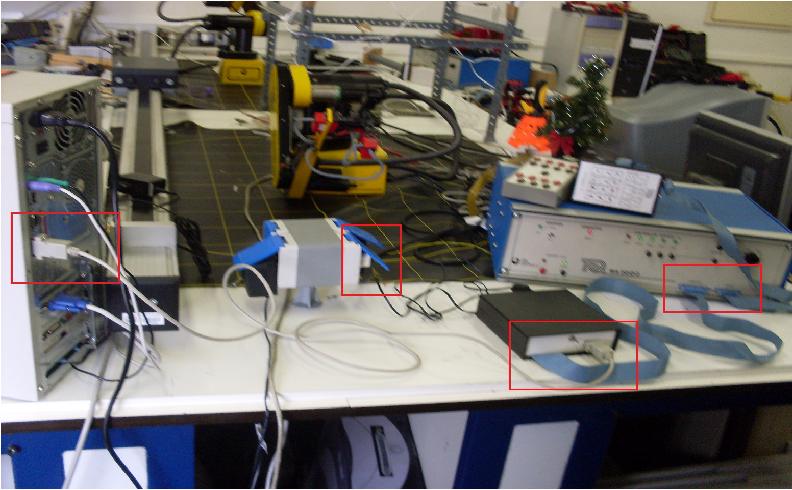
En la siguiente imagen podemos ver el hardware de comunicaciones MA2000 USAL INTERFACE CIRCUIT y su conexión con el resto del sistema, se encuentran resaltadas en rojo las conexiones principales.
En los siguientes videos podemos ver el robot funcionando con el nuevo hardware de comunicación.