Herramienta de monitorización de misiones para robots móviles
Autor: Victor Teniente Mateos
El trabajo que se propone se enmarca en el sector productivo/industrial, formando parte de un proyecto mayor que consiste en la automatización de una carretilla con el fin de conseguir un sistema independiente capaz de realizar tareas de almacenaje sin intervención del usuario.
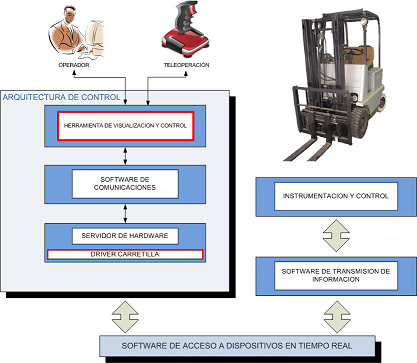
El principal objetivo de este trabajo es crear un nuevo componente en la capa de control y visualización propia de la arquitectura de control adaptado a nuestras necesidades y que pueda coexistir junto con los componentes propios de la arquitectura. Dicho componente debe ser totalmente independiente e integrarse en la plataforma de control de una manera transparente. Para integrar la carretilla dentro de la plataforma, será necesario diseñar y desarrollar específicamente un driver que permita probar y analizar el correcto funcionamiento de todo el sistema global.
En la siguiente figura puede observarse un esquema del sistema global y en color rojo los componentes desarrollados y su integración dentro de la plataforma de control.
En el desarrollo de este proyecto se ha utilizado la arquitectura de control MissionLab diseñada por el Georgia Tech. Esta arquitectura proporciona un amplio conjunto de herramientas software para desarrollar y probar el comportamiento de un robot o un grupo de robots móviles.
La herramienta de visualización y control permitirá configurar el entorno de ejecución, así como el posterior lanzamiento de las tareas a ejecutar por la carretilla. Asimismo, una vez en ejecución y mediante un protocolo de comunicación preestablecido, se solicita la información sensorial y la referente al estado actual del sistema. La teleoperación y guiado de forma automática será otra de las funcionalidades del sistema.
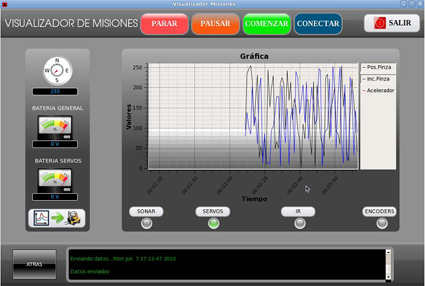
A continuación se muestran una serie de capturas del programa creado.
En la primera figura podemos observar las distintas ventanas que permiten llevar a cabo un control y monitorización de los valores obtenidos desde la carretilla de manera síncrona. Navegando por las diversas secciones de la aplicación podemos realizar un seguimiento de los sonares, servos, encoders, y de todos los demás sensores instalados en la carretilla.
La posibilidad de crear gráficas de manera síncrona con la recepción de los datos procedentes de la carretilla, ofrece al operador una nueva forma de control y monitorización con el fin de observar anomalías en los sensores.
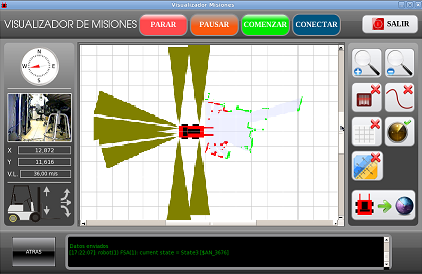
La aplicación permite realizar un control y monitorización completo de la ejecución de la misión. En la parte central de la figura siguiente, se observa el desarrollo de la misión, con la posibilidad de visualizar de manera actualizada los valores referentes a los sonares (triángulos dorados) y al láser (puntos rojos y verdes). Además, se incluye un visor para mostrar las imágenes de la cámara.
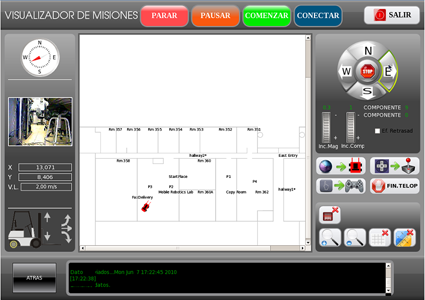
En la siguiente figura, puede observarse la ventana para realizar las tareas de teleoperación sobre la carretilla y observar el resultado de las mismas.
En los siguientes videos podemos ver el programa en ejecución.
Interfaz de teleoperación multimodal y monitorización de misiones para robots móviles
Interfaz de teleoperación multimodal y monitorización de misiones para robots móviles