
Teleoperación de un brazo robótico con
Realidad Aumentada
En la última década
la convergencia de capacidades de procesamiento de imágenes de video en tiempo
real, sistemas gráficos por ordenador y nuevas tecnologías de visualización
han hecho posible la obtención de una imagen virtual correctamente insertada
con la visión del entorno tridimensional que rodea al usuario. Un sistema de
Realidad Aumentada proporciona una visión compuesta para el usuario: se trata
del resultado de la combinación de una escena real y otra virtual generada por
el ordenador que complementa la primera con información adicional. El objetivo
final es crear un sistema en el que el observador no consiga discernir la
diferencia entre el mundo real y la versión
aumentada del mismo.
Este proyecto lleva la Realidad Aumentada al mundo de la robótica en una vertiente didáctica y otra práctica, para ello se ha utilizado la biblioteca ARToolkit.
Desde la perspectiva didáctica, la Realidad Aumentada se aplicará para facilitar la comprensión del método de Denavit y Hartenberg a un robot tipo PUMA. Este método se utiliza de forma muy intensa para resolver el problema de la cinemática de un robot. Así el alumno podrá comprender cómo se posicionan los ejes de los sistemas de referencia de Denavit y Hartenberg en las articulaciones del robot y cómo varían los parámetros de este método.
Para determinar la posición de cada articulación se emplean patrones reconocibles por la biblioteca ARToolkit.
La vertiente práctica consistirá en que el brazo robótico se desplace de forma autónoma desde una configuración inicial donde se encuentra situado el robot hasta una posición objetivo determinada por un patrón, que tendrá que reconocer y situar la aplicación de la biblioteca ARToolkit.
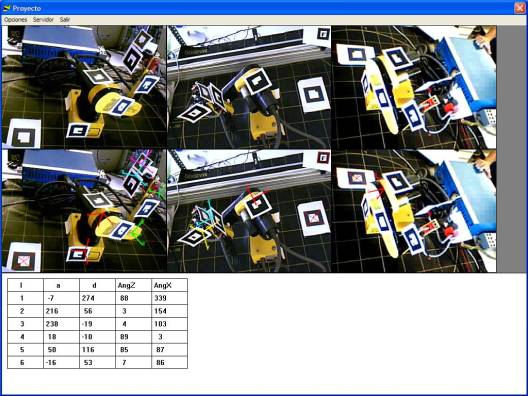
Entorno de desarrollo y trabajo de la aplicación:
Interfaz gráfica en la que se muestran los ejes y los parámetros de Denavit y Hartenberg:
Enlace la memoria y al resumen del proyecto:
Enlaces relacionados con la Realidad Aumentada: